Ich möchte euch ein Frequenznormal 10MHz vorstellen. Ich hatte schon längere Zeit vor ein Frequenznormal zu konstruieren und auch diverse Bauelemente gesammelt. Auf der Hamradio habe ich auf dem Flohmarkt einen OCXO 118-12 10MHz von Isotemp und einen GPS-Empfänger von der Firma FDK-Rockwell mit einem 1PPS Ausgang, der angeblich als 10kHz Ausgang aktiviert werden kann. Nach einigen mislungenen Versuchen im GPS-RX den 10kHz Ausgang zu aktivieren habe ich alles zur Seite gelegt.
Dieses Jahr war ich eine Woche in Italien und dort habe ich in der Zeitschrift „radio elettronica” einen Beitrag gelesen „10MHz sincronizzati con il GPS” von Pietro IH0OTG. In diesem Beitrag ist die Syncronisation mit dem Sekundentakt eines GPS-Empfängers beschrieben. Diese Idee hatte ich auch schon einmal, aber der hohe HW-Aufwand hat mich abgeschreckt.
Pietro verwendet einen speziellen PIC 16F684 für seine Baugruppe. Dieser PIC hat einen speziellen 16Bit Counter mit einem sogenannten „GATE CONTROL”. Dieses PIN ist herausgeführt und damit ist es möglich den Eingang des Counters in Echtzeit zu öffnen und auch zu schließen. Genau das braucht man für eine exakte Frequenzzählung. Ich habe mir einen anderen PIC 16F887 herausgesucht mit den gleichen Eigenschaften bei der externen Zählung von Frequenzen.
Das Prinzip der genauen Frequenzzählung des OCXO ist ganz einfach. Der GPS-RX liefert einen Sekundentakt 1PPS. Die LH Flanke eines 1PPS Taktes wird für den Beginn der Frequenzzählung benutzt und das GATE CONTROL geöffnet. Jetzt wartet der PIC genau 19,5 Sekunden und wartet auf die nächste LH Flanke des Sekundentaktes. Diese Flanke schließt das GATE CONTROL wieder nach exakt 20 Sekunden (mit GPS Genauigkeit). Ist die Frequenz des OCXO exakt 10MHz muß das Zählergebnis im PIC genau 200 000 000 betragen. Eine Abweichung von einem Digit ist ein Frequenzfehler von 0,05Hz. Meine Versuche haben gezeigt, das die Abweichung auch tatsächlich in diesem Bereich bleibt +/- 0,05Hz. Vorausgesetzt der GPS-Empfang ist gut und noch wichiger ist ein hochstabiler OCXO. Die Frequenz des OCXO muß in den 20 Sekunden Messzeit absolut stabil bleiben. Je nach Zählergebnis wird er OCXO sanft nachgeregelt. Bei größerer Abweichung wird grob nachgeregelt und bei kleinen Abweichungen ganz fein. Für die Regelspannungserzeugung wird der PWM-Ausgang des PIC verwendet.
Nach POWER-ON dauert es etwa 20 Minuten bis das Frequenznormal 10MHz +/- 0,05Hz für Kalibrierzwecke benutzt werden kann.

Hier das Schaltbild und die Leiterplatte der zentralen Steuerung und LCD-Anzeige. Zusätzlich zu dieser Platine ist noch der Trafo mit seinen Sicherungen, Der GSP-Empfänger mit seinem 1PPS Ausgang und der OCXO anzuschließen.
Ich musste die Schaltung noch einmal anpassen. Der RS232-Pegel des GPS-RX hat nicht sicher gereicht. Ich habe den Pegel auf 5V angepasst.
HEX-File für den PIC16F887
Ich habe drei verschiedene Varianten entwickelt. Für alle Varianten gilt:Die Regelung der FLL (Frequenz Locked Loop) beginnt erst zu wirken, wenn das Frequenzzählergebnis kleiner +/- 5Hz ist (die rote LED2 erlischt). Die Freigabe der Referenfrequenz von 10MHz erfolgt erst wenn die Frequenzabweichung kleiner-gleich 0,2Hz ist (die grüne LED3 beginnt zu leuchten).
Variante 1
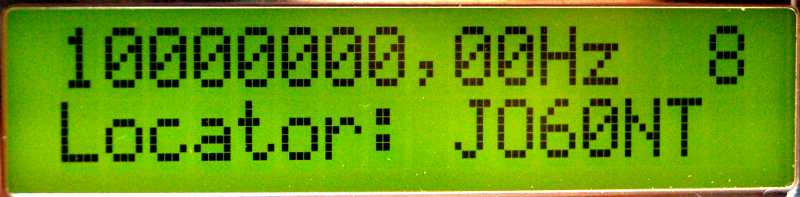
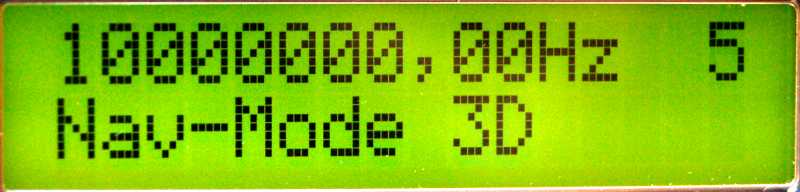
Bei dieser Variante werden die Daten der RS232 ausgewertet. Die Syncronisation beginnt erst wenn der GPS-RX in den Navi-Mode 2D, oder noch besser 3D, wechselt und den genauen Sekundentakt erzeugt. Ich werte die NMEA183-010 GGA und GSA Daten aus. Das 2. Kriterium ist das Thermostat des OCXO. Ist das Thermostat aufgeheizt wird mit der Frequenzzählung begonnen.
Variante 2
Bei dieser Variante wird das Thermostat des OCXO überwacht. Ist das Thermostat aufgeheizt wird mit der Frequenzzählung begonnen. Siehe nächste Variante.
Variante 3
Bei dieser Variante wird nur auf die Frequenzzählung geachtet. Erst bei einer +/- 5Hz wird mit der FLL nachgeregelt. Da die 1PPS Sekundenimpulse zuerst frei, ohne GPS Syncronisation, erzeugt werden, liegt das Frequenzzählergebnis immer außerhalb von 5Hz. Erst wenn der GPS-RX mit der Navigation beginnt stimmen die 1PPS Impulse und das Zählergebnis liegt innerhalb der 5Hz-Abweichung. Das gleiche gilt für den Thermostat de OCXO. In den ersten 15 Minuten ist die Abweichung auch noch zu groß für ein Nachregeln der FLL. Somit ist ein gutes Funktionieren des Frequenznormales auch bei dieser Variante gewährleistet.
Variante 4
Diese Variante ist genau wie die Variante 3, aber die Regelrichtung der FLL (Frequenz Locked Loop) Frequenzregelschleife ist anders herum. Diese Variante habe ich noch programmiert für OCXOs bei denen eine Verringerung der Regelspannung auch eine Verringerung der Frequenz bewirkt. Beim Isotemp OCXO 118-12 erhöht sich die Frequenz bei der Veringerung der Regelspannung.
Die Bedeutung der 4 Tasten. Von Oben nach Unten.
Taste 1
-
diese Taste hat noch keine Funktion.
Taste 2
-
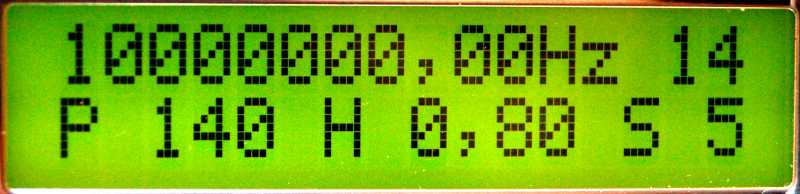
Mit dieser Taste kann die PWM zwangsweise zuerst auf PWM=1, PWM=128, PWM=255 und wieder PWM normal FLL gesetzt werden. Diese Funktion ist wichtig für die Ermittlung des Regelbereiches der FLL. Im Bereich PWM=1 bis PWM=255 sollte die Frequenzabweichung auf keinen Fall größer als 10Hz sein. Zu beachten ist noch, das bei PWM=128 der OCXO auf 10000000Hz schwingt +/- 0,5Hz. Die ganze Frequenzmessung funktioniert aber nur wenn der GPS-Empfang in Ordnung ist und der 1PPS Takt stabil. Wie gesagt, die Einstellung PWM=128 dient zur Justage des OCXO auf die Nennfrequenz von 10000000,00Hz. Aber bitte beachten, dass erst nach min 2-3 Durchläufen (je 20Sek) die OPVs der Frequenznachreglung eingeschwungen sind. Ist der GPS-Empfang OK und der 1PPS-Takt stimmt kann mit der Einstellung PWM=128 die Sollfrequenz des OCXO begonnen werden. Zu diesem Zweck muss beim Isotemp OCXO die Schutzschraube mit dem Warnhinweis gelöst werden und mit dem Abstimmbesteck die Frequenz nachjustiert werden.
Taste 3
-
Diese Taste speichert die PowerON-Einstellung der momentanen PWM als Startwert in den Eeprom des PIC. Diese Einstellung wird dann beim nächsten PowerON benutzt.
Taste 4
-
diese Taste hat noch keine Funktion.
Taste 1
Taste 2
Taste 3
Taste 4
Weitere Bilder

Vorn sehen wir die 3 Festspannungsregler. Ich habe sie mit einem zusätzlichen Messingblech versehen, was mit dem Gehäusedeckel verschraubt wird. So kann die Wärme im inneren optimal abgeleitet werden. In der Mitte das dünne braune Koaxkabel sind die 10MHz aus dem OCXO.

Hinten sind noch weiter Ausgänge für die Referenzfrequenz, 7 Stück. Der BNC-Anschluß mit etwas anderem Aussehen ist der Antennenanschluss des GPS-RX. Der 8. Referenzausgang befindet sich an der Front.

Hier ist der zusätzliche Lüfter zu sehen. Jetzt kann das Frequenznormal den ganzen Tag laufen ohne Schaden zu nehmen.

Ich habe die Temperaturisolierung wieder entfernen müssen, da die Temperatur im Gehäuse zu hoch wurde. Es war sogar nötig einen kleinen Lüfter zu installieren. Der GPS-RX ist sehr klein. Hier hinter dem OXCO.